


Après avoir longtemps nié travailler sur les véhicules autonomes, Apple n’a confirmé qu’en juin dernier qu’il travaille bien sur cette technologie. Et voici que pour la première fois deux de ses chercheurs en IA dévoilent une ‘toute petite’ partie de leurs travaux…
Permettez-moi tout d’abord, afin de poser la problématique des véhicules autonomes, de vous conter une histoire en forme d’énigme, certes connue, mais qu’il est bon de rappeler :
Votre mission est de développer l’algorithme d’évitement de la voiture sans chauffeur. L’hypothèse de départ est simple : si un obstacle se présente sur la route, le véhicule lancé à pleine vitesse qui ne dispose ni du temps ni de la distance pour s'arrêter se dirige vers la droite ou la gauche de l’obstacle pour l’éviter. Si un second obstacle se présente, un enfant qui joue au ballon sur le trottoir par exemple, là encore la réponse est simple, le véhicule se dirigera vers la gauche, et inversement si l’obstacle est une personne âgée qui traverse à gauche et que le trottoir de droite est libre.
Maintenant, émettons l’hypothèse que l’obstacle est un groupe de marcheurs, qu’un enfant joue au ballon sur le trottoir de droite et qu’une personne âgée traverse à gauche. Quel doit être le comportement du véhicule ? Ecraser les marcheurs, écraser l’enfant ou écraser la personne âgée ? Tel est le dilemme du développeur de l’algorithme.
Le dilemme de l'évitement et son algorithme
Bien sûr, j’ai volontairement dramatisé l’histoire en lui associant des obstacles humains. J’aurais pu vous proposer un camion en face, une moto garée à droite, et une voiture sur la voie de gauche. Mais dans ces conditions un autre dilemme se présente au développeur, est-il préférable que le véhicule s’encastre dans le camion, dans la voiture ou dans la moto ?
La réponse à ces hypothèses n’est pas simple. Et pourtant elle est essentielle. Par forcément pour nous futurs utilisateurs de véhicules autonomes d’ailleurs, mais plutôt pour notre assureur. Où est placée la responsabilité ? Comment se déroulera l’indemnisation ? Qui verra augmenter sa cotisation et réduire ses points de bonus ? Bon, je vous l’accorde, migrer sur cette discussion, c’est quelque peu noyer le poisson…
Intéressons-nous aux travaux d’Apple sur le véhicule autonome
Pourquoi évoquer Apple ? Parce que le géant a longtemps nié s’intéresser à la fabrication de voitures sans chauffeur. Et que c’est seulement en juin dernier qu’Apple – sans surprise car c’était de notoriété publique ! – a finalement révélé/confirmé qu’il travaille sur la technologie autonome. Sans pour autant rien dévoiler sur ses travaux…
Mais voilà que deux de ses chercheurs en Intelligence Artificielle et machine learning, Yin Zhou et Oncel Tuzel, ont publié dans la Cornell University Library un mémo répertorié dans le domaine de la ‘Computer Vision and Pattern Recognition’ intitulé « VoxelNet : Apprentissage de bout en bout pour la détection d'objets 3D par nuage de points » (découvrir la publication ici). L’article complet en PDF est également accessible là.
VoxelNet est une architecture qui permet de détecter des petits obstacles à l’aide de la méthode LiDAR de détection et de télémétrie de la lumière. L’idée est simple, développer avec cette technologie la meilleure méthode pour détecter les voitures, mais également les cyclistes et les piétons. Vous comprenez mieux maintenant le pourquoi de notre introduction et l’intérêt que nous avons porté à cette information.
Comment fonctionne VoxelNet ?
Rappelons tout d’abord qu’un voxel est un pixel en 3D dans une bitmap. Il stocke des informations de type coordonnées spatiales et temporelles, colorimétrie, taille relative, etc.
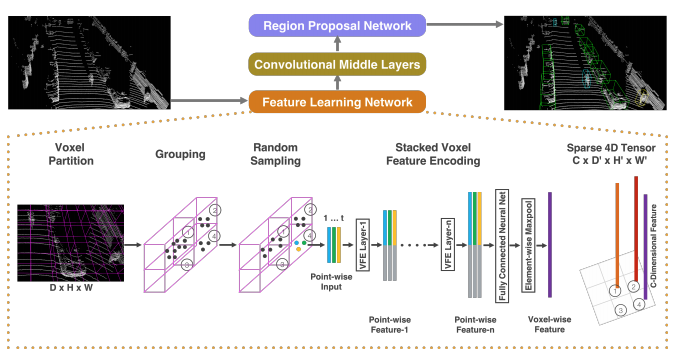
VoxelNet divise un nuage de points 3D voxel également espacés en groupes de points qui représentent des entités unifiées au travers d’une nouvelle couche de codage appelée VFE (Voxel Feature Encoding). Chaque groupe est ensuite connecté à un RPN (réseau privé) chargé de générer des détections.
Cette technologie se révèle beaucoup plus performante que les systèmes basés sur LiDAR. Et surtout, avec l’introduction de l’IA et du machine learning, elle permet au réseau d’apprendre à effectuer une représentation discriminante et efficace des objets présentant différentes géométries, ce qui en particulier facilite la détection 3D des piétons et des cyclistes. Et qui à terme permettra certainement une meilleure anticipation des comportements des obstacles que croise ou affronte la voiture autonome.
Pour revenir sur notre dilemme initial, certes la technologie d’Apple ne répond pas à la question, mais la voiture saura avec plus de précision dans qui elle va s’encastrer !





















